In this post we give an overview of how we started getting Arty to talk to a cAno®. The same process could be applied to a Raspberry PI or Arduino board.
Board files are supplied for Arty on our Github site.
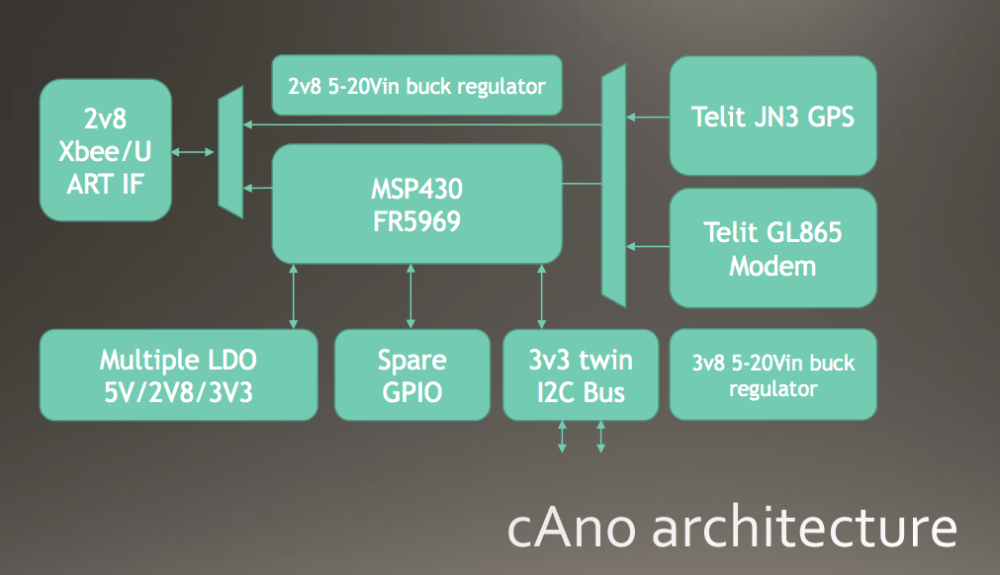
The basic architecture of cAno is shown below. There are many power management options on board as well as a UART and I2C interface for external communication, along with spare GPIO.
cAno was designed to be a standalone data sampler/aggregator, however it can also be used for power management in a bigger system, i.e one with a Raspberry Pi or FPGA as the main processor. Compared to the cAno these use a lot of power and so can be powered off when not required.
GPIO, I2C or the UART interface can be used to pass information between the processors and in this example we are using the UART to send simple messages to test the RX/TX between the two boards.
Once communication is working working a simple control protocol can be implemented on top of the read/write methods.
Using the UART also gives the external processor access to the Modem and GPS if the MSP430FR5969 grants its access, something that can be decided via the control protocol or by using the GPIO, if you have enough spare.
We have preloaded the cAno with a program that searches for a newline char in the link data and then sends a response out on the UART.
On the FPGA we send a message to cAno and every time we get a reply, terminated with a newline char, we send another message.
This method can be used to interface cAno or Arty to multiple other dev boards as required.
